고려대 한민홍 교수팀이 1992년 11월11일 서울 안암동 고려대 이공대 운동장에서 국내 최초로 개발한 무인자동차 시운전을 준비하는 모습. 연합뉴스
‘스스로 알아서 움직이는 자동차’라는 꿈이 지상에서 다양한 형태로 시연된 지는 100년이 넘는다. 사람이 따라다니며 무선으로 원격조종하는 차는 1904년 스페인의 레오나르도 토레스가 처음 구현했고, 묻어놓은 케이블을 따라다니는 차는 1939년 뉴욕 세계박람회에서 제너럴모터스의 후원으로 처음 공개시연됐다.
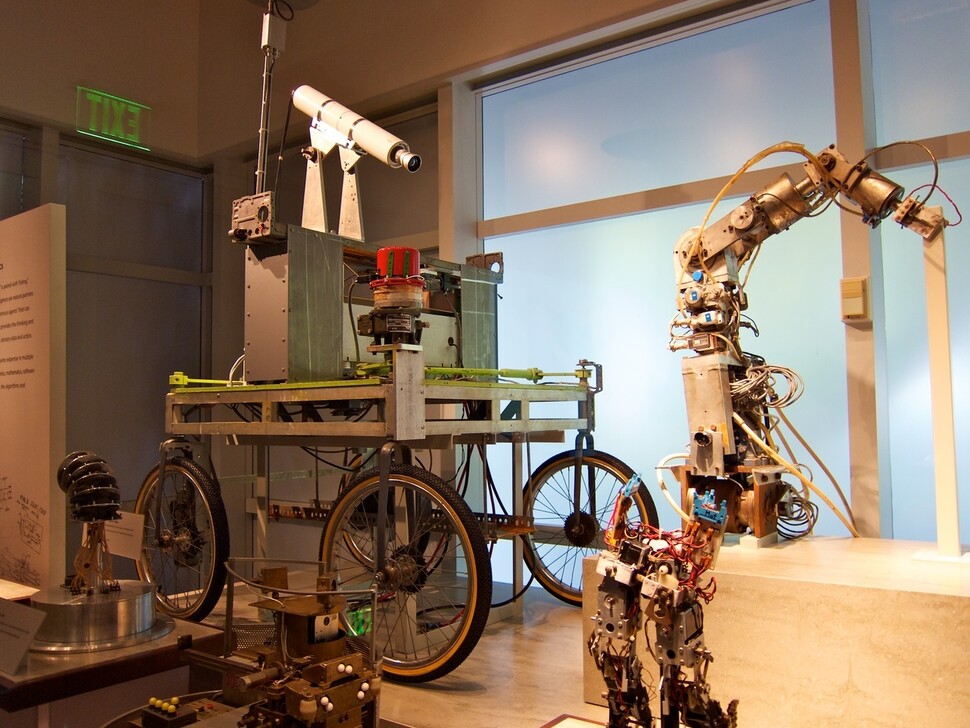
그리고 대중화를 목표로 현재 널리 운행 중인 인공지능 활용 자율주행 자동차의 ‘직계 조상’은 1960년대 초 개발된 ‘무인 월면 자동차’라고 할 수 있다. 미국 스탠퍼드대학 기계공학과 대학원생들이 미국 항공우주국(NASA) 제트추진연구소와 함께 만들어 후일 ‘스탠퍼드 카트’라고 불리게 된 이 장치는 바퀴 네개가 달린 소형 리어카에 모터와 전자회로 그리고 티브이(TV) 카메라를 붙인 것이었다.
지구와 달 사이에는 지령을 전송해서 수행 결과를 확인할 때까지 2.5초 정도의 통신 지연이 발생하기 때문에 과연 지구에서 티브이 화면을 보면서 달에 떨어진 자동차를 원격조종할 수 있는지를 확인해보려는 것이었다. 이 자동차가 달에서 시속 0.3㎞(초속 8㎝ 남짓)보다 빨리 움직이면 지구에서 조종하는 일이 거의 불가능하다는 게 첫 결과였다. 이를 타개하기 위해 아날로그 컴퓨터 회로를 장착해 티브이 화면에 하얀 점을 찍게 했다. 직전 명령에 따라 현재 전진하는 ‘모의 월면차’가 지금 내리는 명령을 받을 때쯤 도달할 예상 위치를 표시한 점이었다. 모든 장애물이 화면에 잘 보인다는 조건 아래 조종 가능 속도를 시속 8㎞로 올릴 수 있었다. 그러나 1962년 9월 존 에프 케네디 대통령이 ‘유인 달 탐사’를 선언하면서 스탠퍼드 카트는 창고에서 먼지만 쌓이는 신세가 되었다.
1960년대 후반 스탠퍼드대 인공지능연구실은 고장난 스탠퍼드 카트를 얻어 왔다. 일단 티브이 화면을 보면서 사람이 원격조종할 수 있게 고친 다음, 무선으로 연결한 미니컴퓨터의 인공지능 프로그램이 조종하도록 개량했다. 도로에 그은 고대비 백색선을 따라가도록 했는데, 조명 상태가 좋으면 시속 1.3㎞까지 가능했다. 카트가 돌아다니며 송출하는 화면을 멍하니 쳐다보는 일을 대학원생들이 휴식 삼아 즐겼다고 한다.
본격적으로 인공지능 자율주행차 연구는 1971년 스탠퍼드대 에이아이연구소에 박사과정으로 입학한 한스 모라베크의 손에서 시작됐다. 사고와 수리를 여러 차례 거친 끝에 1980년께 완성한 시스템은 차체 위에서 좌우로 오가며 촬영 방향을 바꾸는 카메라를 이용해서 입체적으로 화상을 인식해 경로를 설정하는 방식이었다. 조종은 무선으로 연결된 미니컴퓨터에서 돌아가는 인공지능 프로그램이 담당했다. 1m를 이동한 뒤 이리저리 촬영하고 10~15분 정도 계산해서 새로운 경로를 설정해서 움직였다. 카트는 장애물을 피해 서너번 방향을 틀어야 할 정도로 복잡한 20m 코스를 약 5시간 걸려 주행할 수 있기는 했다. 문제는 시간이 흐르면 그림자가 움직인다는 점이었다. 티브이 카메라에는 실제 물체보다 그림자의 모서리가 더 선명하게 비쳐서 인공지능은 그림자를 장애물로, 실제 물체를 허상으로 오인해 부딪히기 일쑤였다.
그래도 모라베크의 연구는 당시로서는 놀라운 성과여서 학위논문을 완성하자마자 카네기멜런대학의 로보틱스연구소로 스카우트되어 실내 주행 로봇을 개발하기도 했다. 그럼에도 모라베크가 원하는 만큼 빠르고 원활한 주행을 달성하는 일은 어려웠다. 중앙처리장치(CPU)가 등장한 이래 디지털 컴퓨터의 연산속도가 급증하는 중이었고, 모라베크가 자율주행에 필요한 계산량을 줄여주는 새로운 공간표현 격자 시스템도 개발했지만 원하는 만큼 성과가 나오질 않았다. 이 무렵부터 모라베크는 어린이나 동물이 쉽게 해낼 수 있는 일은 인공지능이 어려워하고, 인공지능이 비교적 쉽게 해내는 기호주의 논리 추론은 사람이 어려워한다는 대조적인 특성을 조금씩 다른 형태로 말하기 시작했다. 점차 모라베크의 관심 범위가 인공지능 자율주행에서 인공지능 전반으로 넓어지면서 모라베크의 관찰은 ‘모라베크의 역설’로 널리 알려지게 되었다.
디지털 컴퓨터가 감당하기 힘들다면 아날로그 컴퓨터는 가능할까? 1977년 일본 쓰쿠바대학 기계공학연구소는 화물 겸용 내연기관 승용차에 아날로그 컴퓨터를 탑재한 무인주행차를 만들었다. 차체 전면에 2대의 티브이 카메라를 달고, 화면에 비치는 고대비 백색선을 따라 방해물이 없는 도로에서 무인주행할 수 있었다. 시속 30㎞ 주행에 성공하기는 했는데, 더 이상 발전하지 못했다. 아날로그 컴퓨터는 일단 완성되면 설계 범위 안에서 원활하게 실시간으로 작동하지만, 기능을 추가하거나 작동 가능한 환경을 확대하려면 처음부터 다시 만들어야 하기 때문이다.
일본 정부가 ‘제5세대 컴퓨터 시스템 개발 계획’을 발표(1982년)하고 미국과 유럽도 이에 자극을 받아 인공지능 지원을 이어가면서 자율주행 분야는 1984년에 전환점을 맞게 된다. 카네기멜런대 로보틱스연구소에서 모라베크의 첫 박사학위 지도학생인 찰스 소프가 미국 국방고등연구국(DARPA)에 제출한 자율주행 자동차 연구실 설립 지원 제안서가 신호탄이었다.
소프는 국방고등연구국의 지원 승인을 얻기도 전에 내브랩(NavLab)을 조직해 새 자율주행 자동차를 제작하기 시작했다. 1986년 완성된 첫 작품 내브랩 1호는 초속 1m로 달리며 2초마다 화상을 분석해서 상황을 파악할 수 있었다. 소프가 모라베크의 가르침을 받아 제작했던 차량과 큰 차이가 없는 수준이지만, 차량과 소프트웨어 구조가 달라졌다. 승합차를 사용한 덕분에 화물칸에 워크스테이션을 탑재해 무선 연결이 필요 없었고, 자율주행 인공지능을 여러 하위 시스템들로 분할한 점이 가장 큰 혁신이었다. 티브이 카메라뿐만 아니라 소나나 레이저 거리계 등을 추가하고 그것들을 운용하는 소프트웨어를 통합하는 일도 쉬워졌다. 나중에는 위성항법시스템(GPS)도 추가했다.
카네기멜런대 로보틱스연구소의 딘 포멀로가 1995년 6월12일 미국 피츠버그의 한 공원에서 자율주행을 시연하고 있는 모습. AP 연합뉴스
새로운 소프트웨어 구조의 장점은 1990년 극명하게 드러났다. 소프는 상황에 맞춰 운전대를 돌리는 파트가 점점 복잡해져서 어려움을 겪고 있었는데, 카네기멜런 로보틱스연구소에 새로 들어온 대학원생 딘 포멀로가 운전대를 조종하는 인공신경망을 만들어 해결해버린 것이었다. 포멀로가 만든 ‘알빈 시스템’은 30*32 해상도의 티브이 화면과 8*32 해상도의 레이저 거리계 데이터에서 1217개의 입력신호를 받아서 운전대를 몇도를 돌려야 하는지 결정하는 3층 인공신경망이었다. 1988년에 시뮬레이션으로 인공신경망을 훈련하고 1990년부터는 실제 도로주행 훈련에 들어갔다. 소프는 사람이 몇십분 주행하면서 인공신경망을 훈련시키고 나면, 알빈 시스템이 능숙하게 도로를 따라 운전대를 꺾는 모습에 감탄했다고 한다.
1995년에는 내브랩 5호가 미국 동해안의 워싱턴디시부터 서해안의 샌디에이고까지의 도로 중 98.5%를 운전대에 손을 대지 않고 주파하는 데 성공했다. 브레이크와 액셀 조작은 사람이 했고, 1993년에 촬영해둔 데이터로 훈련한 운전대 조종용 새 인공지능을 사용했다. 수동 조작한 1.5% 구간은 2년 사이에 달라진 도로 구간이었다.
☞한겨레S 뉴스레터 구독하기. 검색창에 ‘한겨레 뉴스레터’를 쳐보세요.
☞한겨레신문 정기구독. 검색창에 ‘한겨레 하니누리’를 쳐보세요.
독일에서는 1984년 에른스트 디크만스가 다임러벤츠의 후원으로 새롭게 자율주행차 개발에 뛰어들었다. 미국 나사에서 일하기도 했던 우주시스템 제어공학자인 디크만스는 뮌헨연방군대학교에서 위성 제어에 화상인식 기술을 활용하는 위성 자동 도킹 시스템을 시연하는 데 성공했다. 디크만스는 당시 유럽에서 논의되던 자율주행, 즉 매설된 케이블이 차량을 안내하는 방식 대신 화상인식 기술만으로 자율주행하는 방식을 제안해서 유럽의 기술 개발 방향을 바꾸는 데 중요한 역할을 했다.
3년 만에 인적이 없는 도로에서 자율주행 승합차로 최고 시속 96㎞ 주행에 성공했다. 디크만스는 컴퓨터 능력의 한계를 극복하는 데 주력했다. 필요한 저장용량을 축소하기 위해 이전 촬영 데이터를 별도 저장하지 않고도 차량의 위치와 속도를 계산하는 수학적 모델을 개발했다. 잡음신호가 많고 측정 정확도가 낮은 상황에서는 제어공학계에서 널리 쓰이는 칼만 필터 기술을 활용해서 차량을 안정적으로 주행할 수 있게 했다. 1995년 가을에는 미국 내브랩 5호의 주행에 대항하여 독일 뮌헨에서 덴마크 오덴세까지 주행하는 데 성공했다. 운전자가 개입한 횟수는 좀 더 많았지만 흑백 카메라만 사용했고, 사전 촬영한 데이터의 도움을 받지도 않은 채 최고 시속 175㎞를 찍었다.
1990년대는 인공지능 화상인식형 자율주행 연구가 조금씩 확산되던 시기였다. 고려대학교 산업공학과 한민홍 교수팀도 대단한 성과를 보였다. 1992년에 처음 선보인 자율주행차는 내브랩 초기 버전과 비슷했지만 최고 운행속도는 30㎞대로 훨씬 빨랐다. 1996년에는 경부고속도로 주행에도 성공했다. 미국과 독일보다 별로 뒤지지 않는 상황이었다. 그럼에도 산업계의 관심을 끌지 못했다. 어쩌면 장기 투자가 필요한 기술 개발을 꾸준히 진행하기에는 한국 산업환경으로는 시기상조였을지도 모른다.
달 탐사를 목표로 개발돼 ‘자율주행차의 직계 조상’이라고 할 수 있는 ‘스탠퍼드 카트’. 위키피디아
세계적으로 산업계가 자율주행차 투자를 시작한 계기는 2004년 미국 국방고등연구국이 개최한 제1회 그랜드 챌린지였다. 지피에스로 안내되는 240㎞ 오프로드 경로에서 튀어나온 장애물을 피해 주행하는 것이었데 아무도 성공하지 못했지만, 다음해 2회 대회에서는 다섯팀이 성공했다. 2007년의 도심 챌린지는 사전에 시디(CD)로 제공된 경로를 참고해서 주행하는 것이었다. 시가전 상황을 염두에 둔 설정이었는데, 사라진 맨홀 뚜껑이나 푹 파인 도로 같은 힘든 장애물은 없었다.
자율주행 자동차의 관점에서는 야지와 전장보다 신경써야 할 사항이 많은 일반 생활환경이 더 복잡하고 혼란스러웠다. 그럼에도 2010년대 들어서서 몇년 안에 완전 자율주행이 곧 실현되리라는 기대가 팽배했다. 제도적 정비도 활발해져서 2012년 독일 연방고속도로연구소와 2013년 미국 전국고속도로교통안전관리청이 각각 4단계 분류 기준체계를 발표했고, 2014년 국제자동차엔지니어협회는 독일과 미국의 체계를 통합해서 세분화한 5단계 분류 체계를 발표했다. 지난 10년간 완전자율주행 실현 예언은 계속 틀렸지만, 실현 전망 시기가 ‘몇년 안’에서 ‘내후년’으로 당겨진 것은 사실이다. 복잡한 인간 생활환경에 적응하는 인공지능에 사람이 다시 적응해야 할 시기도 빨라지고 있다.
이관수 과학저술가
서울대학교 물리학과를 졸업하고 과학사 및 과학철학 협동과정에서 박사 학위를 취득했다. 가톨릭대학교 교양교육원 초빙교수를 거쳐 현재 동국대학교 다르마칼리지에 재직 중이다.
면책 조항: 이 글의 저작권은 원저작자에게 있습니다. 이 기사의 재게시 목적은 정보 전달에 있으며, 어떠한 투자 조언도 포함되지 않습니다. 만약 침해 행위가 있을 경우, 즉시 연락해 주시기 바랍니다. 수정
또는 삭제 조치를 취하겠습니다. 감사합니다.
 admin
Published On:
admin
Published On: