카이스트 연구팀, 국제 4족로봇 대회 압도적 우승
 곽노필 기자
Published On:
곽노필 기자
Published On:
Summary
사족보행로봇 경진대회에서 장애물을 통과하고 있는 카이스트의 로봇. 카이스트 제공 시각이나 촉각 센서의 도움 없이 어두운 곳에서도 자율보행할 수 있는 제어 시스템 ‘드림워크(Drea...
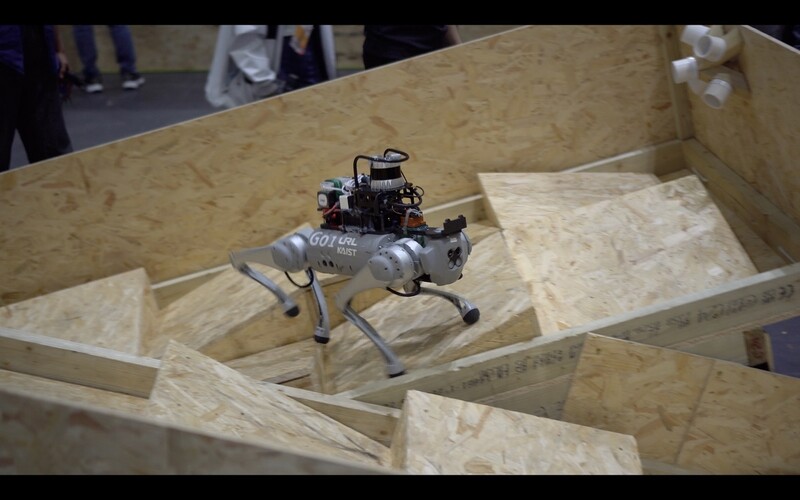
사족보행로봇 경진대회에서 장애물을 통과하고 있는 카이스트의 로봇. 카이스트 제공

로봇 경진대회 우승을 차지한 카이스트 연구팀. 로봇을 들고 있는 뒷줄 왼쪽부터 오민호 박사과정, 이현우 박사과정, 이승재 석사과정, 이동규 석사과정. 앞줄 왼쪽부터 마심 케빈 크리스티안센 석박사통합과정, 김예은 박사과정, 이 마데 아스윈 나렌드라 박사과정, 명현 교수, 팀장 유병호 박사과정. 카이스트 제공
면책 조항: 이 글의 저작권은 원저작자에게 있습니다. 이 기사의 재게시 목적은 정보 전달에 있으며, 어떠한 투자 조언도 포함되지 않습니다. 만약 침해 행위가 있을 경우, 즉시 연락해 주시기 바랍니다. 수정 또는 삭제 조치를 취하겠습니다. 감사합니다.